Grundlagen der Fla Raketentechnik
Bestimmung
der Winkelkoordinaten Ziel und Raketen
 wie funktioniert denn das ?
wie funktioniert denn das ?
Der Artikel beinhaltet :
lokale Koordinaten , zentralisierte
Koordinaten , relative Koordinaten
-
Wie werden Koordinaten
-
-
erfassen des Flugkörpers nach dem Start
-
Warum Selektion in 3 Koordinaten , warum Blanking und Tiefe der zeitlichen
Verstärkungsregulierung
-
Nichterfassen des Flugkörpers
-
Probleme beim Erfassen des Flugkörpers bei Zielen in geringen Höhen
Populärwissenschaftlich geschrieben . Keine
Geheimnisse militärischer Art im Artikel .
 Koordinatenbestimmung allgemein
Koordinatenbestimmung allgemein
|
Koordinaten
relative Koordinaten Messimpuls
Torschaltung erfassen
lokale Koordinaten
Selektion |
|
 Was
sind Koordinaten Was
sind Koordinaten
LOKAL
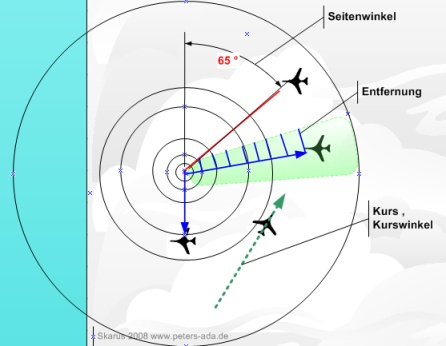
Typische
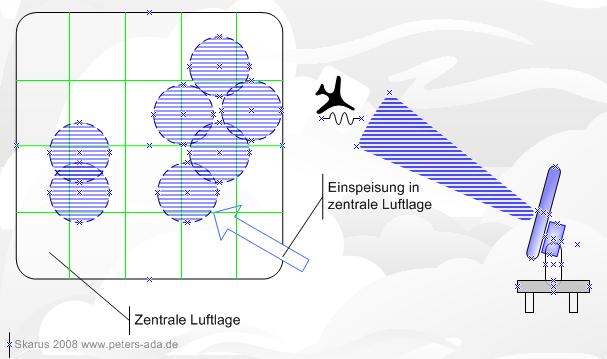
Darstellung Rundsichtgerät zur Darstellung der lokalen Luftlage

Ein Netz von RADAR- Anlagen
Während eine Feuereinheit der Fla Rak eigene Mittel
der Luftraumaufklärung nutzt , lässt sich eine weiträumige Luftlage durch
Zusammenschluss vieler RADAR Anlagen erstellen. Diese Anlagen können
dauerhaft und fest installiert werden . Zusätzlich können mobile
Einheiten lokal und zeitlich begrenzt aufgebaut werden.
Jede Station erzeugt lokal für sich und auf sich
bezogen Zielkoordinaten . Diese werden in ein einheitliches Muster
gebracht und sind für anderen Nutzer lesbar .Notwendig ist
ein einheitliches Koordinatensystem.
Die Luftlage kann zentralisiert ausgewertet werden .
Zielkoordinaten werden durch ein einheitliches Koordinatensystem an
andere Feuereinheiten durchgereicht. Solche einheitlichen Systeme
beruhen auf einem gemeinsamen Nullpunkt . Die Lage im Raum wird
auf die Entfernung bzw. die Winkellage bezogen auf den Nullpunkt
beschrieben. Man nimmt den Äquator und den Nullmeridian von Greenwich
als Urspurung. Die Lage eines Flugkörpers wird entweder als absolute Km
Angabe oder Winkellage ( das kommt aus der Seefahrt ) angegeben .
Zur Vereinfachung wird die gesamte Erde Großquadrate
aufgeteilt. Diese Quadrate haben 60 Minuten ( Winkel ) Ausmaße. Die Km
und Meterzahlen sind den Winkelangaben identisch. So lässt sich mit
Nennung des Großquadrates und weiterer immer feinerer Unterteilung ein
Luftziel bis auf wenige Meter genau beschreiben .
Zur Lenkung von Flugkörpern ist das Verfahren
ungeeignet.
Bezeichnungen sind :
UTM
GEOREFF
Typische Navigationssysteme aus der Luftfahrt geben
diese Angaben in geografischen Angaben als Winkel an:
Beispiel
xx° xx` nördlicher Breite und xx° xx` östlicher
Länge .
 Einspeisung in die zentrale
LL
Einspeisung in die zentrale
LL
Wie werden
Koordinaten von gelenkten Raketen im Flug
bestimmt ?
Zur Lenkung von Flugkörpern müssen die 4 Zielkoordinaten
vom Ziel und die 4 Koordinaten von jedem gelenkten Flugkörper im Flug und in Echtzeit bestimmt werden.
Diese Angaben werden von einer Recheneinheit in
Echtzeit bearbeitet und Lenkkommandos an die Flugkörper erarbeitet.
Die Lenkung erfolgt nach Lenkgesetzten (
Leitmethoden
)
Entgegen weitläufig verbreiteter Meinung werden die
Koordinaten von Ziel und Treffpunkt nicht ( ! ) vor dem Start
auskalkuliert.
Vielmehr werden Lenkkommandos an den Flugkörper auf
der Echtzeitlage der Zielkoordinaten und der des Flugkörpers in Echtzeit
erarbeitet und Lenkkommandos an den Flugkörper gesendet .
Die Ausgabe der Koordinaten erfolgt technisch , dh
als Lage von Messimpulsen zueinander. Die Ausgabe erfolgt nicht
numerisch als geografische Koordinate im Raum !
Die Abarbeitung der Abweichung erfolgt durch Regeln .
Diese Regeln , Leitmethoden beschreiben wie mit Abweichungen von
Messimpulsen zu verfahren ist.
Aus der Lage der Pulse und ihrer Bewegung werden
Koordinaten wie Geschwindigkeit ( m /sec )
Entfernung , Winkelbeschleunigungen und
Entfernung Flugkörper zum Ziel , Annäherungsgeschwindigkeit Rakete zu
Ziel etc . bestimmt.
Als Nebenprodukt werden diese numerisch angezeigt .
|
|
Koordinaten legen die Lage im Raum in 4 Eigenschaften fest .
Höhe ,Seite und
Entfernung beziehen sich auf eine Radaranlage.
Dabei handelt es sich um eine lokale ( eigene ) Anlage .
Das kann ein
Längen und Breitengrad auf der Erde sein. Legt man noch eine
gemeinsame Ausrichtung fest ( z.B. nach Norden ) lässt sich die räumliche
Lage eines Flugzeuges beschreiben : XX Km westlich von
der Referenz (
Nullmeridian auf der Erde ) und YY Km nördlich vom Äquator.
Wenn man über die Erde ein Gitter
legt , lässt sich die Lage des Flugzeuges nach der
Gitternummer ( dem Groß
- Quadrat ) angeben .
Als Maßeinheit kann man die
geografischen Angaben in Grad , Minuten und Sekunden nutzen
( GPS Signal ) oder Km und Meter . Beide Einheiten lassen sich über
einen Zusammenhang beidseitig umrechnen.
Bei 4 dimensionaler Anzeige wird die
Geschwindigkeit als Koordinate erfasst. Der Kurs der
einzelnen Flugzeuge wird über eine Zeitdauer
dargestellt .
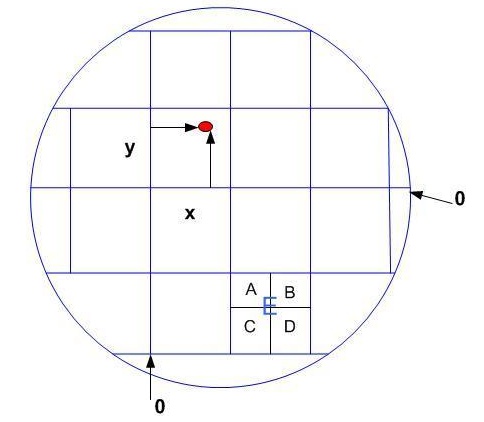
absolute Angaben als X und Y Koordinaten
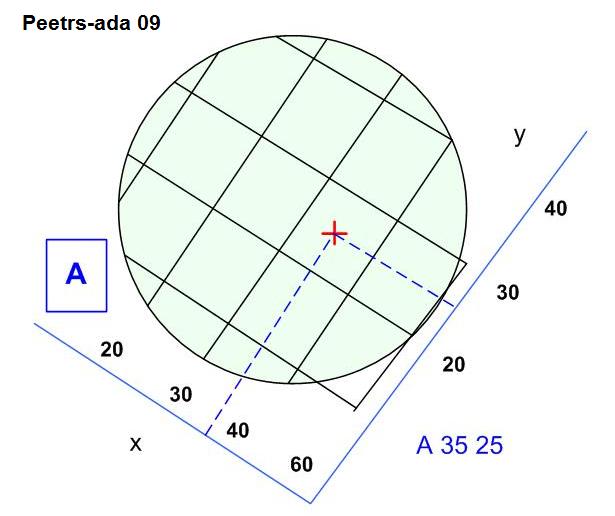
Verfeinerung durch Nennung des Großquadrates
E
Mit weiterer Unterteilung nach A und weiterer Unterteilung nach Winkelmaßen
X =35 und Y =25 . Die Koordinate
könnte lauten EA 35 25.
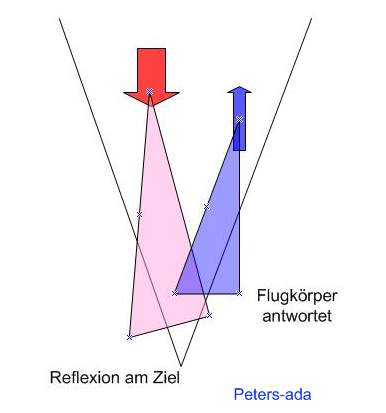
Messimpuls
Rakete und Ziel für eine Ebene
( oder Entfernung )
Die
Abweichung von rot zu blau wird über Lenkkommandos abgearbeitet. Die Ausgabe
erfolgt nicht " 3 m links" , oder "0,5° nach links" etc. Auch erfolgt die
Koordinaten Ausgabe nicht in 3D , ähnlich einem GPS Gerät.
Leitmethoden von
Fla Raketen
Benötigt werden
Entfernung Rakete Ziel untereinander
Δ e
Winkellage Ziel ɛ
( bezogen auf Flugkörper, relativ )
sowie Änderungen von e und ɛ über die Zeit ( Beschleunigungen )
|
In Bearbeitung
Bestimmung der Zielkoordinaten
in Bearbeitung
Zielkoordinaten
An der Richtung zum Ziel ( ANTENNE ) befindet sich die Information Winkellage
Seite
Höhe
Die Winkellage wird innerhalb der Antenne bestimmt.
Flimmerpeilung
Monopuls
Unter dem Begriff Monopuls-Antenne werden Bauformen von
Antennen
zusammengefasst, die zwei oder vier Zuleitungen haben. Mit den Signalen der
verschiedenen Zuleitungen können für verschiedenste Zwecke unterschiedliche
Summen und Differenzen gebildet werden
Bei der Monopulsantenne werden die einzelnen Strahler in vier
Quadranten
aufgeteilt, deren jeweilige Empfangsleistung sowohl summenbildend, als auch
differenzbildend verschaltet werden. Mit diesen Signalen kann ein Rechner die
Position eines Zieles innerhalb des Peilstrahls bestimmen.
Ein Echo genügt!
In einer Monopulsantenne kann durch Vergleich von Summen- und verschiedenen
Differenzkanälen eine Lokalisierung des reflektierenden Objektes innerhalb des
Radarbeams erfolgen.
Durch eine gegenphasige Kopplung der linken zu den rechten Antennengruppen wird
ein Differenzkanal (ΔAz) (sprich: „Delta Azimut”) gebildet.
Der Azimut wird nun dadurch bestimmt, dass in diesem Winkel bei einem Maximum
des Summenkanals der Differenzkanal ein Minimum haben muss. Da der
Summenkanal (Σ) und der Differenzkanal aus nur einem Echo gebildet werden
können, genügt (zumindest in störungsfreier Umgebung) ein Impuls zur
genauen Berechnung der Koordinaten. (Deshalb erhielt diese Antennengruppierung
auch den Namen Monopulsantenne.)
Das Verhältnis von Summenkanal zum Differenzkanal ist das Maß für die Abweichung
der realen Richtung von der Mittelachse der Antenne (englisch: „Boresight”). Die
Winkeldifferenz zwischen Mittelachse der Antenne und dem tatsächlichen
Seitenwinkel des Targets wird „Off-Boresight Angle” (OBA) genannt.
Bei 3D- Radargeräten wird als dritte Koordinate auch noch der
Höhenwinkel
gemessen. Auch hier kann das Verfahren angewendet werden. Hier wird die Antenne
in eine obere und eine untere Hälfte gruppiert. Der zweite Differenzkanal (ΔEl)
heißt nun „Delta Elevation”.
http://www.radartutorial.eu/06.antennas/an17.de.html
RADAR
Grundlagen
Dipl. Ing (FH) Christian Wolff
mit freundlicher Genehmigung
Track Beam
Es haben sich zwei technische Methoden durchgesetzt: die Minimumpeilung und das
Monopulssystem:
-
Bei
der
Minimumpeilung
rotiert ein schmales Antennendiagramm um die Achse, auf der sich auch der
Standort des Zieles befindet. Bewegt sich das Ziel aus dieser Achse heraus,
wird eine Fehlerspannung erzeugt und die Antenne nachgeführt, um wieder ein
minimales Echosignal zu erhalten.
-
Beim
Monopulssystem
werden vier Antennendiagramme gleichzeitig durch phasenabhängige Summenbildung
von vier Empfangsantennen. Das Ziel muss sich immer in der Mitte der vier
Diagramme befinden, sonst wird ein Fehlersignal erzeugt und die Diagramme
wieder auf das Ziel gerichtet.
Kommandogelenkt
wird ein System der Raketenleitung genannt, bei welchem ein Rechner
Steuersignale für die Rakete errechnet und mit dem Kommandosender zur Rakete
überträgt, um einen direkten Weg der Rakete zum Treffpunkt zu ermöglichen.
Capture Beam / Guidance Beam
Bei kommandogelenkten Raketen dient ein sehr breites
Antennendiagramm
(Capture Beam) zur Erfassung der Rakete kurz nach dem Start, um diese in das
schmalere Antennendiagramm des Kommandosenders (guidance beam) zu leiten. Das
Bild zeigt den Weg einer gestarteten Rakete zum Zeitpunkt des Erfassens der
Rakete durch die Leitstation.
-
Eine
Radarantenne ist das Teil in einem Hochfrequenzsystem, welches Energie in Form
von elektromagnetischen Wellen sendet oder empfängt.
-
Die
Umkehrbarkeit des Vorganges bewirkt, dass man die gleiche Antenne zum Senden
und zum Empfangen nutzen kann.
-
Die
zwei hauptsächlich verwendeten Typen sind die Parabolreflektorantenne
(„Schüssel”) und die Phased Array Antenne.
-
Antennen werden in zwei Gruppen eingeteilt: Richtantennen und Rundstrahler.
-
Omnidirektionale Antennen (oder Rundstrahler) strahlen ungerichtet ab.
-
Richtantennen bündeln die Energie in einem möglichst kleinen Öffnungswinkel
in eine definierte Hauptrichtung, welche abhängig von der mechanischen
Antennenposition ist.
-
Das
Antennendiagramm kann sowohl in einem kartesischen (rechtwinkligen) als auch
in einem Polarkoordinatensystem gezeichnet werden.
-
Ein isotroper Strahler strahlt die Energie gleichmäßig in alle Richtungen
ab.
-
Ein anisotroper Strahler strahlt die Energie ungleichmäßig ab.
-
Eine Hauptkeule enthält die meiste abgestrahlte Energie.
-
Nebenkeulen und die Rückkeule sind unerwünscht und sollen möglichst klein
sein.
-
Bei
einer
Monopulsantenne
werden im Summenkanal für ein Ziel eine sehr große Zielamplitude gemessen. Im
Differenzkanal kann für dieses Ziel allerdings kein Echo beobachtet werden.
Das kann heißen:
 der
Off- Boresight Angle ist gleich Null Grad, der
Off- Boresight Angle ist gleich Null Grad,
das
Ziel befindet sich genau in der Mitte des Antennendiagramms,
der
Summenkanal ist defekt oder übersteuert.
-
Bei
einer Monopulsantenne wurden bei Wartungsarbeiten versehentlich die
Antennenzuleitungen für die Differenzkanäle ΔAz (Delta Azimut) und ΔEl (Delta
Elevation) vertauscht. Wie wirkt sich das auf das Radar aus?
Die
Reichweite des Radargerätes sinkt,
weil die Sendeleistung falsch (gegenphasig) verteilt wird.
Dieser
Fehler wirkt sich nur auf den Empfang aus,
da diese Signale erst nach den Duplexern auf dem Empfangsweg gebildet
werden.
Bestimmung der Koordinaten
von Flugkörpern im Raum
Fügen Sie hier
die Hauptüberschrift ein
|
|
Fügen Sie hier eine Überschrift ein
|
Fügen Sie hier die Überschrift für den Abschnitt ein
Markieren und überschreiben Sie den Text, der ersetzt
werden soll. Verwenden Sie Formatvorlagen wie Überschrift 1-3 und Normal
in dem Formatvorlagensteuerelement auf der Symbolleiste "Formatierung".
Franz jagt im komplett verwahrlosten Taxi quer durch
Bayern. Franz jagt im komplett verwahrlosten Taxi quer durch Bayern.
Franz jagt im komplett verwahrlosten Taxi quer durch Bayern. Franz jagt
im komplett verwahrlosten Taxi quer durch Bayern. Franz jagt im komplett
verwahrlosten Taxi quer durch Bayern.
Fügen Sie hier die Überschrift für den Abschnitt ein
Franz jagt im komplett verwahrlosten Taxi quer durch
Bayern. Franz jagt im komplett verwahrlosten Taxi quer durch Bayern.
Franz jagt im komplett verwahrlosten Taxi quer durch Bayern. Franz jagt
im komplett verwahrlosten Taxi quer durch Bayern. Franz jagt im komplett
verwahrlosten Taxi quer durch Bayern.
- Listenelement
- Listenelement
- Listenelement
Fügen Sie hier die Überschrift für den Abschnitt ein
Franz jagt im komplett verwahrlosten Taxi quer durch
Bayern. Franz jagt im komplett verwahrlosten Taxi quer durch Bayern.
Franz jagt im komplett verwahrlosten Taxi quer durch Bayern. Franz jagt
im komplett verwahrlosten Taxi quer durch Bayern. Franz jagt im komplett
verwahrlosten Taxi quer durch Bayern.
|
Koordinaten des Luftzieles : Höhe , Seite , Geschwindigkeit . Aus
den gewonnenen Messimpulsen ( Nadel oder Rechteck Form ) können die
absolute Geschwindigkeit , relative Geschwindigkeit zur
Raketenleitstation , Winkelgeschwindigkeiten , Beschleunigungen (
Änderungen der Winkelgeschwindigkeiten, über mathematische Verfahren (
Ableitungen ) ausgegeben werden. Die Raketensignale gelangen über aktive
Abstrahlung der Flugkörper selbst zur Raketenleitstation und werden
entweder über die gemeinsame Empfangsantenne Ziel und Flugkörper
empfangen.
Zur Lenkung von Flugkörpern müssen die 4 Zielkoordinaten
vom Ziel und die 4 Koordinaten von jedem gelenkten Flugkörper im Flug und in Echtzeit bestimmt werden.
Diese Angaben werden von einer Recheneinheit in
Echtzeit bearbeitet und Lenkkommandos an die Flugkörper erarbeitet.
Die Lenkung erfolgt nach Lenkgesetzten (
Leitmethoden
)
Entgegen weitläufig verbreiteter Meinung werden die
Koordinaten von Ziel und Treffpunkt nicht ( ! ) vor dem Start
auskalkuliert.
Vielmehr werden Lenkkommandos an den Flugkörper auf
der Echtzeitlage der Zielkoordinaten und der des Flugkörpers in Echtzeit
erarbeitet und Lenkkommandos an den Flugkörper gesendet .
Die Ausgabe der Koordinaten erfolgt technisch , dh
als Lage von Messimpulsen zueinander. Die Ausgabe erfolgt nicht
numerisch als geografische Koordinate im Raum !
Die Abarbeitung der Abweichung erfolgt durch Regeln .
Diese Regeln , Leitmethoden beschreiben wie mit Abweichungen von
Messimpulsen zu verfahren ist.
Aus der Lage der Pulse und ihrer Bewegung werden
Koordinaten wie Geschwindigkeit ( m /sec )
Entfernung , Winkelbeschleunigungen und
Entfernung Flugkörper zum Ziel , Annäherungsgeschwindigkeit Rakete zu
Ziel etc . bestimmt.
Als Nebenprodukt werden diese numerisch angezeig
Prinzipien :
Kommandolenkung
TVM
2 pkt Methode
Hinweis auf Arbeit RLS ; belecuhtung ,
Lwnkung oder nur Beleuchtung
Fehler in koordinatenmbestimung . systematische ,
von aussen beinflusst , ( jamming fading ) Flugverhalten
Systembedingt -technische Realisierung , Zunahme Lenkfehler mit
Entfernung etc
Störungen im regelkreis - Rückkopelung
Sprungantwort
Fouruier keine Rolle
aber Echtzeit
 Nach dem Start von Fla Raketen
Nach dem Start von Fla Raketen
Bei der Steuerung von Fla Raketen vom
Boden aus werden Koordinaten von Ziel und Flugkörper im Flug verglichen und
Lenkkommandos an den Flugkörper gebildet. Bei Lenkverfahren nach TVM ( track via
missile ) wird das Ziel durch die Leitantenne beleuchtet . Der Flugkörper
erfasst sein Zielzeichen und lenkt sich selbst ohne Zutun der Bodenanlage zum
Ziel. Die Koordinatenbestimmung befindet sich an Bord des Flugkörpers. Üblich
sind Mischformen, dh. Heranlenkung des Flugkörpers vom Boden aus und
Selbstlenkung des Flugkörpers im letzten Flugabschnitt .
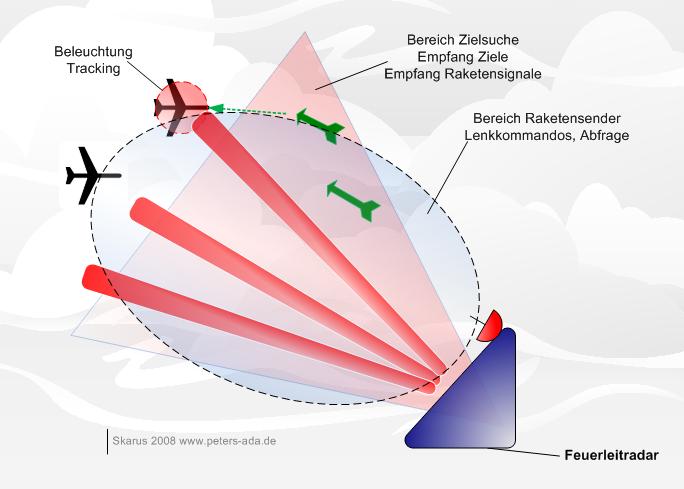
Der Flugkörper antwortet aktiv
Flugkörper im Fluge werden durch den
Raketensender angestrahlt . Dessen Antennenrichtdiagramm muss die gesamte
mögliche Fluglage der Flugkörper im Seiten und Höhenwinkel abdecken.
( mechanische und parabole Form oder elektronischer Strahlschwenkung )
Die
Empfangsanlage muss die Raketensignale aus allen Fluglagen ( Winkel
in Seite und Höhe ) im weiten Winkelbereich und mit
Polarisationsverdrehungen
durch Verdrehungen der Flugkörper während des Fluges empfangen. Gleiches
gilt für die Empfangsanlage im Flugkörper. Es treten Fluktuationen ua.
durch Polarisationsverdrehung auf. Abhilfe schafft
zirkulare Polarisation beim Sender und
Empfänger RADAR und Flugkörper.


Ziel und Raketensignale werden über eine Antenne empfangen
Flugkörper wird angestrahlt und antwortet aktiv. Die
Feuerleitantenne sucht den Flugkörper selbst nicht. Aber aus der
Einfallrichtung der Raketensignale wird über die elektronische
Strahlschwenkung "rückwärts" die Lage im Raum bestimmt . Die Abfrage der
Flugkörper kann nun über elektronische Strahlschwenkung gerichtet ( Leistung
) im Seiten und Höhenwinkel zum Flugkörper gestrahlt werden. Es handelt sich
nicht ( ! ) um einen Tracking Strahl. Es werden nur Abfragen an den / die
Flugkörper gesendet.
Die Lage im Raum wird zur Darstellung auf Sichtgeräten der Flugkörper
benötigt , die Winkelkoordinaten werden damit nicht bestimmt .Zusatzaufgaben
wie die Bestimmung des optimalen Startzeitpunktes , die numerische Angabe
der Entfernung , Geschwindigkeit etc. werden daraus errechnet .
Empfangen wird " rückwärts " mit elektronischer
Strahlschenkung . Die Lage des Flugkörpers wird für den nächsten Abfragepuls grob vorhergesagt
und wird in die ungefähre zu erwartende Richtung / Höhe abgestrahlt
.Gleichzeitig wird nach zeitlicher Taktung der Empfang der
Raketensignale erwartet .
Über Monopulsverfahren wird die exakte Lage im
Raum als Messimpuls bestimmt ( Grundlage ist das empfangene Signal des
Flugkörpers )
Zielbeleuchtung , Tracking des Zieles und Anleuchten
Flugkörper und Empfang sind zeitlich voneinander getrennte Prozesse und
erfolgen unabhängig voneinander.
Flugkörper muss sich im gemeinsamen Antennenrichtdiagramm Zielsuche
und Beleuchtung befinden
Wichtig ist , dass sich alle Flugkörper im
Antennenrichtdiagramm Senden der Abfrage und im Empfangsdiagramm ( gemeinsam
Ziel und Flugkörper ) befinden. Bei Antennen mit elektronischer
Strahlschwenkung hat sich eine Empfangsdiagramm von 90 ° im Sektor
durchgesetzt.
In Abhängigkeit von
Leitmethoden werden werden über die
Sende / Empfangsantenne Lenkkommandos an die Flugkörper abgestrahlt.
Ältere analoge RADAR - Anlagen hatten für die unterschiedlichen Aufgaben verschiedene Antennen. So
auch zur Übertragung de Lenkkommandos , zur Abfrage und eine Anlage zum
Empfang der Raketensignale. Zielsignale wurden wiederum mit einer anderen
Antenne abgestrahlt bzw. empfangen. Andere Konstruktionen von Feuerleitanlagen
hatten eine andere Philosophie und empfingen Ziel und Raketensignale mit
einer Antenne. Beide Varianten haben Vor und Nachteile.
Neuere Feuerleitanlagen ( digital und
elektronische Strahlschwenkung nutzen die selbe Antenne zum Zielbeleuchten ,
sowie Ziel und Raketenempfang . ( russische S 300 / SA10 S 400 ,
Patriot , MEADS ) Die Raketensignale werden über
die gemeinsame Antenne Ziel-Raketensignale empfangen. Die
unterschiedlichen Signale ( Frequenz , Form , Puls , Leistung etc. ) werden in getrennten
Kanälen verarbeitet : Zielkanal und Raketenkanal .
Bei Antennen mit elektronischer
Strahlschwenkung ist der Empfangsbereich abhängig von der Anzahl der
aktiven/passiven Antennenelemente und den Möglichkeiten einen maximalen
Winkel nach der Seite / Höhe abzustrahlen. Günstige Werte ohne Verzerrungen
werden bis 30 ° ( auch 45 ° ) erreicht. Darüber hinaus wird eine
weitere Auslenkung zur Ziellagebestimmung ungenau und verzerrt.
Tiefe der zeitlichen Verstärkungsregulierung im Raketenkanal und
Blanking im Zielkanal
Die Verarbeitung der Raketensignale erfolgt
automatisch ohne Zutun der Operatoren in der Feuerleitanlage. Die
Empfangsanlage weist hohe Dynamik auf : im Nahbereich haben die
Raketensignale große Leistung . Bis zum Treffpunkt nimmt die
Empfangsleistung ab , zusätzlich kommen durch Fading Schwankungen hinzu.
Fading hat großen Einfluss auf die Genauigkeit der Koordinatenbestimmung
durch die Folgesysteme. Über eine Regulierung der Verstärkung im Nahbereich
( " Tiefe der zeitlichen Verstärkungsregulierung " , deutscher Begriff ) und
einer sehr schnellen automatischen Regulierung der Amplitude werden
Fluktuationsfehler der Messimpulse unterdrückt. Im Gegensatz zum Zielkanal
wird der Raketenkanal in der Entfernung nicht ( ! ) im Nahbereich gesperrt (
Blanking )
Der Zielkanal wird " geblankt " wegen großer
Reflektionsleistungen im Nahbereich ( Boden , clutter ) und hat nichts ( ! )
mit dem " Totbereich " zu tun. Technisch ist es möglich nach einigen
hundert Metern
Entfernung Zielzeichen zu empfangen .
Totbereich : Sende
-Empfangsanlage schaltet elektronisch zwischen Senden und Empfangen um.
Während des Sendens können keine Signale ( Ziel und Raketensignale )
empfangen werden. Bei gepulster Abstrahlung können diese Sperrzeiten 0,1 -
0,5 µs
betragen . Bei heutigen modernen Sendeanlagen
werden die Sendepulse " gezirpt ". Diese Sendepulse können bis zu 100 µs
( und mehr ) zeitliche Dauer haben. Der Totbereich vergrößert sich auf
einige hundert Meter .
Für den Nahbereich am RADAR ( früher hieß das "örtliche
Rose " ) lassen sich einzelne Seitenwinkel / Sektoren im Empfänger
ausblenden und sperren. Es wird in diese Winkel eingestrahlt aber im
Empfänger gesperrt. Ebenfalls ist es technisch möglich in diese diese
Seitenwinkel nicht abzustrahlen. Man vermeidet Reflexionen von Reflexionen
der Erdoberfläche bzw. Hindernissen im Nahbereich. Der Empfänger wird "
durch Reflexionen im Nahbereich "geblendet " ..
Original Artikel bei
Antennen
Erfassen Nach dem Start
des Flugkörpers werden die abgestrahlten Signale des Flugkörpers im Nahbereich (
ca. ab 300 - 1000 m Entfernung ) empfangen und verschiedene
Signale von mehreren Flugkörper unterschieden . Das Radar selbst
strahlt den Flugkörper nicht an und empfängt die reflektierten Signale ( Nein !
) Technisch gibt es mehrere Lösungen: der Flugkörper wird durch das RADAR
abgefragt ( ähnlich IFF Freund Feind Kennungsanlage ) und antwortet. Oder Der
Flugkörper antwortet und strahlt Signale im GHz Bereich selbständig rückwärts
zum Feuerleit- RADAR .
Es gibt keinen Tracking Strahl für die Rakete
Die Sende - Empfangsantennen gewährt das Erfassen im gesamten
Winkelbereich . Bei Antennen mit elektronischer Strahlschwenkung muss der
voraussichtliche Seitenwinkel an dem der Flugkörper erscheint vorgegeben werden.
In diesen Sektor wird der Empfangsbereich geöffnet Es wird kein Tracking
Strahl auf den Flugkörper gestellt oder der Flugkörper in einem engen Strahl
gehalten . Nach dem Verlassen des Flugkörpers aus
Kanister / Rampe und erstem Antworten nach Abfrage
"erwartet " das RADAR ( der Raketenkanal ) ein Raketensignal .
Die Lage ist nicht genau vorhersagbar. ( ZB benötigen
russische Fla Raksysteme SA 3 , SA 2 , SA 5 , SA 10 die
Seitenwinkellage , Höhe der Rampe und Entfernung bezogen auf das RADAR
für ein optimales Erfassen , es wird sogar die Winkelgeschwindigkeit beim
mitdrehen nach dem Ziel berücksichtigt ) DAS RADAR
erwartet das Auftauchen des Flugkörpers in einem Seitenwinkel .
Das RADAR öffnet sich im Raketenkanal über die volle Breite und Höhe
Der
Empfangsbereich für Raketensignale ist technisch in den Winkeln so weit wie
möglich offen . Die
Erfassungs-Logik öffnet ein Zeitfenster und wartet . Die Raketenabfrage sendet .
Erscheint kein Flugkörper schließt sich das Fenster , der Raketenkanal schließt
sich für diesen Flugkörper. Es wird eine Fehlermeldung generiert .

Die " Entfernung " beginnt als Erste
Ein Raketensignal nun empfangen . Ein Geschwindigkeitsfilter
prüft , ob es sich um eine Fla Rakete ( die eigene ) handelt: hat das
Signal die entsprechende Geschwindigkeit , bewegt es ich von mir fort ?
Als nächstes läuft das Raketensignal in die wartende Logik
der Entfernungserfassung ein .


Signal erzeugt in beiden Hälften der Torschaltung
ein Ungleichgewicht. Fehlersignal stellt das Tor wieder auf die Mitte .
2 Begleitpulse (
Torschaltung ) stellen sich auf das Raketensignal . Das Tor ist ein
Regelkreis und stellt sich automatisch auf das Zeichen und regelt sich
selbständig auf die Mitte . Nach dem erfassen der Entfernung wird die Entfernung
selektiert : ein Entfernungsfenster öffnet nur den Bereich um das
Raketenzeichen . ( Entfernungsselektion )
Jetzt stellen sich die Torschaltung Winkellage " Höhe " und
"Seite " auf das Signal. Ein "Fehlgriff " auf ein anderes Raketensignal ( bei
SALVO ) oder Festzeichen am Boden wird durch die Selektion und
Aussperrung der Entfernung ausgeschlossen.
Diesen Prozess nennt man umgangsprachig : Erfassen .
3 Koordinaten werden nun gleichzeitig und in Echtzeit an den
Rechner abgeliefert .
Warum Selektion nach den 3 Koordinaten
Nach dem Erfassen in den Winkeln werden im Empfänger
die Raketensignale ebenso wie die Entfernung selektiert, der Bereich
außerhalb für im Empfänger gesperrt .

Selektion und Aussperrung nach Entfernung und
Winkeln . Flugkörper wird angestrahlt und Antwortet. Die Lage des Flugkörpers
ist bekannt . Der Strahl wird gerichtet zum Flugkörper ausgelenkt .
ENDE


Der Flugkörper wurde nicht erfasst
Neben technischen Ursachen in der Erfassungsschaltung kommt
jamming in Betrachtung . Spätestens nach dem 2. Verlust des Flugkörpers
unmittelbar nach dem Start .
Wind
Windlast
siehe auch : Link
Korrektur
der Windlast
welchen Einfluss spielt Wind ?
In Bearbeitung :
Selektion nach Winkel, Entfernung und
Geschwindigkeit
In Bearbeitung :
Was ist
der Totbereich ?
RADAR ausblanken , erklären
Flugkörper WRU
Wie entsteht nahe Grenze
In Bearbeitung : Formel Lastvielfache
Formel Lastvielfache verlinken zu Flugmechanbik
Der Flugkörper wurde nicht erfasst
Neben technischen Ursachen in der Erfassungsschaltung kommt
jamming in Betrachtung . Spätestens nach dem 2. Verlust des Flugkörpers
unmittelbar nach dem Start .
Wind
Windlast
siehe auch : Link
Korrektur
der Windlast
Der Flugkörper wurde im Flug verloren
geringe Höhen
jamming
Abriss der Lenkung , ausfliegen und Lastvielfache
Fehlschuss
Nichterfassen des Flugkörpers :
link zur
Taktik und ELOKA
ELO2 jam
Ablage bei jamming aus
der Sicht dr Koordinatenbestimmung
jamming gegen Raketenkanal
in Bearbeitung
Abtastrate
Abtastrate
wie oft wird das Raketensignal empfanbgen
Zeitdauer kleiner als Ansprecjhbereich Fu Zün und Vernichtungsbereich, kleier
als e Auflösevermögen
1000 m/sec VR gewählter Bereich 20 m .
20 ms
Warum Selektion nach den Winkeln ) als Überschrift
Erfassen und Übergang auf Festziele , andere Reflexionen
Flug in geringen Höhen
Störschutz
Kein Geschwindigkeitsfilter , VR nicht const, Verlust 1/3 bis zur Endgrenze , 50
% passiver Flug
bei Manövern kann die VR aus der Sicht des RADR 0 sein 8 Kreisflug , " um die
Ecke "
jamming :
rauschen : Selektion seinnlos
winkelstörungen : Selektion seinnlos
aber ; Funzü Schärfung bzw ER=RZ Zündkommando
Querverweise auf Peters -ada :
ELOKA Spezial : Einfluss auf Koordinatenbestimmung und Vernichtungswahrscheinlichkeit
Ist die Fla Rakete ablenkbar ?
Störfestigkeit
Einfluss elektronischer Störungen auf die
Lenkgenauigkeit von Fla Raketen
Warum
jamming ? Ist die Fla Rakete ablenkbar ?
Koordinatenbestimmung
Ablagen im Treffpunkt
ARM attack
jamming gegen Raketenkanal
Vernichtungswahrscheinlichkeit Einfluss auf Koordinatenbestimmung und Vernichtungswahrscheinlichkeit
Ist die Fla Rakete ablenkbar ?
Ablagen im Treffpunkt
Koordinatenbestimmung
Frequenzwechsel
Chaff / Düppel wie werden
Koordinaten
bei Fla Systemen bestimmt ? Warum jamming ? Was bedeutet das für die
Fla Rak
Prinzip der Koordinatenbestimmung
|
|
2 Rechteckimpulse ( grün ) decken das Ziel ( oder Raketensignal ) für eine Ebene ab. Ein Integrator vergleicht die abgedeckten beiden Flächen vom Zielzeichen. Weichen beide voneinander ab, werden beide Rechteckimpulse solange geschoben, bis sie wieder genau auf der elektrischen Mitte des Zielzeichen stehen. An der Rückflanke des Rechteckimpulses wird der eigentliche Messimpuls der Winkelkoordinate erzeugt. siehe auch : Geräte zur Lenkung
von Fla Raketen , Lehrbuch. Militärverlag DDR 1984 deutsch Die Entfernungsbestimmung erfolgt nach dem gleichen Prinzip. Winkelabdeckung für die Raketensignale bzw. deren Entfernung erfolgt immer durch eine Maschine, während die Zielabdeckung für das Zielzeichen auch durch Handbegleitung möglich ist . ( optische Begleitung bzw. Handbegleitung funktioniert unter Bedingungen der elektronischen Niederhaltung. ) Die Systeme für die Raketensignale lassen sich stören und sind eine Option der ELOKA .
|
|
Koordinate "Seite"
Ziel und Rakete
während des gelenkten Fluges .
|
Im Gegensatz zur weit verbreiteter Meinung bestimmt die Raketenleitstation über Empfänger und nachfolgender Digitalisierung und Aufarbeitung der Nutzsignale alle Koordinaten relativ
.
Die
Darstellung zum Beispiel als Matrizen , Vektoren oder 3 D ( mathematisch
x- y- z ) ist unüblich . Auch wird der Treffpunkt zum Ziel vor dem Start nicht berechnet
. Das Flugverhalten des Zieles lässt sich nicht vorhersagen . Nach
Vorlage der Zielkoordinaten wird in Echtzeit der optimale Startzeitpunkt
berechnet . Signale und Koordinaten der Fla Raketen liegen zu diesem
Zeitpunkt ( noch ) nicht vor. Bestimmt wird die Abweichung der Winkellage des Flugkörpers ( in 2 Ebenen ) zur Winkellage des Zieles ( in den 2 Ebenen ) . Die Abweichung als solche ist Beginn der Nachstellung des zu lenkenden Flugkörpers auf die geforderte Winkellage des Zieles.
Winkellage
Rakete
/ Ziel
stimmen überein. Ablage = 0 = Flugkörper liegt auf dem für
den jetzigen Zeitpunkt notwendigen Punkt im Raum . Die
Rechenanlage erarbeitet zZ keine Lenkkommandos . Die Entfernung wird
bei bestimmten Leitmethoden für Lenkkommandos betrachtet . Die Flugbahn wird nicht im
voraus berechnet. Der Treffpunkt liegt nicht fest und wird vom Luftziel bestimmt. Dessen Verhalten kann nicht vorhergesagt werden.
Bei der Erarbeitung der Lenkkommandos wird aber die Laufzeit der Signale
vom Flugkörper zur Antenne und zurück beachtet. Die Kommandos an den
Flugkörper haben eine gewisse Prognose ( Regelkreis ) und
Steilheit. Es wird ein zusätzlicher ( geringer ) Faktor zugegeben .
( über die e-Funktion im Lenkkommando lässt sich die Steilheit stufenlos
beeinflussen )
|
|
|
Winkelabweichung liegt vor. Rechner arbeitet und berechnet ein Lenkkommando nach Formel der Leitmethode und sendet dieses an der Flugkörper.
Das Rechengerät vergleicht ständig beide Nadelimpulse miteinander und stellt über die Leitmethode und Ruderausschläge an der Rakete beide Pulse aufeinander. Der gelenkte Flugkörper wird dazu nicht wie das Ziel mit RADAR angestrahlt , vielmehr wird ein Abfrage - Puls gesendet und der
Flugkörper antwortet mit eigenem RADAR. Lenkkommandos werden so lange gegeben bis die Abdeckung wieder erreicht ist . Im Flugkörper werden Luftruder ( oder bei modernen Raketen auch Triebwerke an der Spitze gezündet ) angesteuert. Hier müssen beim Bewegen der Ruder Kräfte im Bereich von mehreren tausend Kp aufgebracht werden. Bei früheren Systemen gibt es nur 2 Ausschläge : rechts - links. So wird der Sollwert mit Verzögerung ( Masseträgheit ) erreicht. Nun schwingt der Raketenkörper weiter, da die Lenkkommandos entweder noch immer anliegen oder mit Verzögerung abgestellt werden. Zusätzlich kommt die Ungenauigkeit der Koordinatenbestimmung und deren Verzögerung zur Geltung. Das Pendeln wird immer kleiner , bis der Flugkörper wiederum seine exakte Lage eingenommen hat. Zusätzlich bewegt sich das Ziel ständig weiter und verändert auch seine Winkellage. das muss nun wiederum nachgesteuert werden.
Es ist möglich , vorausschauend Lenkkommandos zu geben ( beim SA3 werden die Kommandos an den fliegenden Flugkörper mit Hilfe der e - Funktion an die laufende Entfernung angepasst. ) Die Lenkung erfolgt in Echtzeit. Bei Geschwindigkeiten von 1000 m/s wirken sich die Verzögerungszeiten und Trägheit so aus, dass ständig Ablagen entstehen. Die Leitmethode soll diese ständigen Ablagen so klein halten , dass diese innerhalb der Wirkung des Gefechtsteiles bleiben.
Abweichungen sind normal , jeglicher Regelungsvorgang beruht auf der Änderung einer zu regelnden Größe. Beim der Lenkung von PATRIOT Flugkörpern sind Direkttreffer möglich . ( Ablage kleiner 1 m ) Durch digitale Datenverarbeitung in Echtzeit an Bord des Flugkörpers und Nutzung von Wellenlängen im mm Bereich ( RADAR ) werden Treffer gegen Ziele mit 3000 - 6000 m/s Anfluggeschwindigkeit erreicht. ( Vernichtung anfliegender taktsicher Raketen TBM )
|
|
|
Der Flugkörper wurde gesteuert, nun wandert dieser nach der anderen Seite aus und wird zurückgestellt.
Das
Raketenausweichmanöver beruht auf diesem Zusammenhang. Bekannt ist z.B., für das Luftabwehrsystem S 125 NEVA / SA 3 , das 9 - 7 sec. vor dem Treffpunkt ein 3 dimensionales Manöver des Flugzeuges sich ungünstig auf die Ablage und damit Vernichtungswahrscheinlichkeit im Treffpunkt auswirkt.
Der Regelkreis arbeitet die plötzliche Verschiebung des Zieles in jeder Ebene ab und steuert den Flugkörper nach. Alles Überschwingen und Nachregeln
kann dazu führen , dass der Flugkörper in größerer Entfernung am Ziel detoniert oder gar ein Fehlschuss auftritt.
Die Ruder bewegen sich ständig quasi nach der Regel : an aus an aus Mittellage rechts links an aus Mittellage etc.
Auf Videos zum Endanflug von PATRIOT Flugkörpern ist dieses " zackige und eckige " Lenken zu beobachten .
siehe auch
PAC3
Im Gegensatz zu weit verbreiteten Meinung wird die Flugbahn nicht im voraus berechnet , diese wird in Echtzeit direkt für jede Zeitpunkt für den Flugkörper kalkuliert. Die Rechenregel dafür ist die Formel der Leitmethode. Auf jedem Punkt der Flugbahn wird verglichen : Liegt die Winkelkoordinate auf der des Zieles ( bei Zielabdeckungsverfahren ) bzw. ist eine gewollte Abweichung ( der entfernungsabhängige Vorhalt ) eingenommen. Wenn nicht- wird nachgeregelt. Der Vorhalt ändert sich damit ständig. Zusätzlich kommen "Störungen " in den Regelkreis , das sich der "Sollwertgeber " Ziel ständig bewegt.
Betrachtet wurde nur
eine Lenkebene . Zur Vernichtung eines Luftzieles muss der Flugkörper 3 dimensional gesteuert werden : 2 Winkelebenen . Die Entfernung wird nicht bei allen Leitmethoden benötigt. Der Rechner rechnet also ständig nut 2 Ebenen und regelt den Flugkörper. Da mehrere Flugkörper gleichzeitig gelenkt werden müssen , sind hier mehrere Verfahren möglich : für jeden Flugkörper einen eigenen Kanal , oder abwechselndes Nutzen der Kanäle (Luftabwehrsystem SA 3 ) Die Lenkkommandos werden in Richtung der Flugkörper abgestrahlt. Jeder Flugkörper "erkennt " seine Lenkbefehle Befehle ( z.B.. Pulscodierung )
Erfahrungen der nordvietnamesischen Luftverteidigung
mit dem System S75 / SA2 gegen B52 Bomber unter schweren Bedingungen
der ELOKA ( elektronischer Kampf und Niederhaltung ) führten dazu , dass Raketensender scheinbar von der Leistung überdimensioniert werden. Störung der Übertragungswege zu den gelenkten Flugkörpern führt zum Abriss der Lenkung oder großen Ablagen.
|
Während des gelenkten Fluges der Fla Rakete
|
|
Der Abriss der Lenkung der Fla Rakete ist möglich , wenn das Zielsignal aus dem Empfangssektor der Sende / Empfangsantenne gelangt. Entgegen verbreiteter Meinung ist das Ausmanövrieren der anfliegenden Rakete durch Querflug , S - förmige Flugmanöver nutzlos. Der max. Vorhalt lässt Ausfliegen aus dem Antennensektor nicht zu. In der Leitmethode selbst werden die Größen berechnet, bereits bei der Entwicklung werden Extremwerte auskalkuliert. So lässt sich durch einsetzten in die Formeln für das Waffensystem SA3 für Methode halbe Begradigung ein max. Vorhalt für jede Ebene von
ca. 6 ° berechnen. Das stimmt auch mit visuellen Beobachtungen auf dem Leitsichtgerät überein. Der "Buckel" der Flugbahn wurde durch die Formel begrenzt. Ausfliegen aus dem RADAR- Bereich wird unterbunden Manöver wirken sich darin aus, dass durch mechanische Begrenzung de Ruderausschläge bzw. durch die Formel selbst , diese Manöver nicht optimal abgearbeitet werden können. Die Übergangsprozesse dauern länger , der Flugkörper " hängt " auf seiner Flugbahn durch , er kann den Manövern nicht folgen. theoretische Betrachtungen: Der Leser rechne ( schätze )
selbst : Wie groß ist die Winkelgeschwindigkeit eines sich
mit 1000 m/s quer zur Antennen bewegenden Luftzieles in 25 Km : gering Wie groß ist die Winkelgeschwindigkeit eines Luftzieles in 25 Km , dass einen Vollkreis fliegt ? unbedeutend Für Ziele in geringen Höhen gilt : diese Winkelgeschwindigkeiten steigen mit Anflug ( Kartenebene ) an die Leitantenne an. Der Höhenwinkel steigt ab 5 Km nicht mehr linear an . ( secans ) .
( Für Zielanflüge im Tiefflugbereich unter 1000 m , eigenes Beobachten und Beurteilen durch den Autor ). Der Höhenwinkel steigt unbedeutend , um dann ab 5 Km Zielentfernung sehr stark anzusteigen. Vorbeiflug an der Antenne kann die Zielbegleitung abreißen lassen . ( SA3 System verträgt "nur " 2 °/sec
für die Antennensteuerung. Hier wurde durch Versuche festgestellt , dass die Mitführgeschwindigkeit bewusst gebremst werden muss um Flugkörper lenken zu können. Die 2 °/sec treten im Nahbereich beim SA3 System im Vorbeiflug von 2 - 3 Km an der Antenne im Vorbeiflug auf. In diesen Entfernungen sollten alle Bekämpfungen abgeschlossen sein. Vor Ort , aus der Sicht der fliegenden Rakete treten in Zielnähe bedeutende Winkelgeschwindigkeiten auf. Diese werden mit den technisch möglichen aufzubringenden Lastvielfachen in der Vernichtungszone aufgebracht ( bis zu 40 g ) Manöver werden durch den Vorhalt in Vorhaltemethoden kompensiert. Im Gegensatz zu Abdeckungsmethoden fliegt der Flugkörper diese Manöver nicht mit und erst mit geringer werdender Entfernung zum Ziel wird der Vorhalt geringer . Beachtet werden muss auch : mit zunehmender Entfernung zum Ziel nimmt die Genauigkeit der Koordinatenbestimmung und die Lenkgenauigkeit ab. Deswegen werden kombinierte Verfahren eingesetzt . Der Endflug kann durch Selbstlenkung auf das Ziel verwirklicht ( 2 Punkte Methode ) werden Hierzu muss das Ziel
nur noch abgestrahlt werden.
|
Probleme beim Schiessen in geringen Höhen
Ziele in geringen Höhen reflektieren die vom RADAR kommende HF Energie nicht nur zum RADAR zurück , sondern auch an den Erdboden . Nun gelangen die Zielreflexionen über diesen Umweg zum RADAR zurück. Wegen der längeren Laufzeit erschient das Zielzeichen in seinen räumlichen Ausmaßen länger und verzerrt. Durch Phasenveränderung am Erdboden , Fluktuationen mit Phasenveränderungen , Polarisationsfluktuationen , Veränderung der Sende / Empfangsfrequenz und Beugung wird das Zielsignal verzerrt. Der Flugkörper wird im Ergebnis ungenauer gelenkt, je nach Leitmethode treten zusätzliche Fluktuationslastvielfache während des Fluges auf. Ein weiteres
Problem ist die Erkennung sich bewegender Ziele gegen die
Reflexionen der Erdoberfläche .
( örtliche Rose , Bodenclutter ) Über MTI
( moving target indicator , SBZ Selektion beweglicher Ziele ) werden Ziele , die sich bewegen
( mit Phasenveränderung ) bearbeitet. Das Einbringen zusätzlicher Systeme verschlechtert insgesamt die Eigenschaften des Empfängers ( Empfindlichkeit ) zusätzlich . Zusätzliche Systeme - wie diese - verschlechtern die genaue interne Koordinatenbestimmung
( Für das System S 125 NEVA / SA3 als Beispiel um 30 % ) .
2 Rechteckimpulse ( Tor 1 und Tor 2 ) stehen auf dem Zielzeichen. Sind beide Flächeninhalte gleich groß , so stehen beide genau auf dem Ziel, ist bei einem der beiden die ( grüne ) Fläche größer erzeugt das eine Regelspannung , die über Verzögerungsschaltung den Impuls verschiebt. An der Rückflanke wird Messimpuls generiert. Dieser stellt für die jeweilige Ebene ( Seite , Höhe , Entfernung ) die Koordinate im RADAR dar. Bei Nutzung von MTI stellt sich das Zielzeichen verzerrt dar. Zusätzlich gibt es fading. Der Messimpuls steht unruhig und pendelt über dem Zielzeichen.
Weitere Probleme sind das Auffassen von tief fliegenden Zielen in der Entfernung . Nach der 4,18 Formel lassen sich Entfernungen für tief fliegende Ziele unter Berücksichtigung der Beugung in Erdnähe berechnen. ( nein , das ist nicht die 4/3 grafische Diagramlösung der GEAG , Autor ) Für die fliegenden Flugkörper treten die gleichen Probleme auf. Antwortsignale an das RADAR ( BAKE ) werden nicht nur auf dem direkten Weg , sondern auch indirekt über den " Umweg " Erdoberfläche verzerrt. Wegen der Beugung des fokussierten RADARstrahles ( beam )
wird die Beleuchtung des Ziels zwar gewährleistet , es gelangen " parasitäre " Anteile nach Reflexion am Ziel zum Suchkopf der Rakete.
Probleme ergeben sich für den Funkzünder der Fla Rakete. Dieser soll nicht auf die Erdoberfläche ansprechen und vorzeitig detonieren. Man hebt die Flugbahn der Flugkörper deswegen an. Beim Angeben der Flugbahn ergibt sich ein erneutes Problem. Zum Treffpunkt wird ständig die genaue Entfernung benötigt. Das Entfernungsfolgesystem kann beim Fliegen durch den Bodenclutter ( Reflexionen an Festzielen , Erdoberfläche ) auf diese aufschalten. Der Flugkörper geht damit verloren. Schiessen ohne Entfernungsbestimmung ist aber möglich. Bei bestimmten Leitmethoden von Fla Raketen ( ( Dreipunktemethode ) und Schiessen nach dem optischen Kanal wird die Entfernung nicht benötigt. Es besteht
aber die Gefahr, das der Funkzünder auf die Erdoberfläche anspricht .
Entstehung Spiegelsignal . Das nachfolgend ankommende Signal wurde am Boden reflektiert : Spiegelsignal
Das Schiessen gegen Ziele in geringen Höhen gegen Marschflugkörper birgt weitere Probleme.
Bei Nichtbeachtung der Fressellzone oder / und Hindernissen im Nahbereich am RADAR kann es für verschiedene ( ! ) Seitenwinkel unterschiedlich ( ! ) tiefe Auffasszonen geben. Radare ab den 70er Jahren habe für die Nahziel- / Festzielunterdrückung Möglichkeiten diese entfernungsabhängig im Nahbereich zu unterdrücken. Bei ungünstigen Wetterlagen
( Nebel , nasser Boden nach Regen ) verstärken sich diese Effekte . Falscher Standort schafft im ungünstigsten Fall eine blinde Zone für tief fliegende Ziele und verschiedene Seitenwinkel. Abhilfe schafft nur Erhöhung des RADAR oder Änderung des RADAR- Standortes um einige 50 m.
( praktische Erfahrung am System SA 3 , Autor ) Systeme mit Pulskompression scheinen dafür eine gewisse Schwäche zu haben. ( Ludlow,
Praxiswissen Radar und Radarsignalverarbeitung
)
Ob die Russen bei Ihren ( digitalen ) Systemen "chirpen " ist dem Autor nicht bekannt. In Wüstengebieten ( oä. ) mit starker Abkühlung / Erwärmung der Luft über dem Boden
( nach Beginn der Dämmerung , bzw. Tagesanbruch ) kommt es zur Verstärkung dieser Effekte , der Beam wird zusätzlich gegen die Eroberfläche gebeugt.
( praktische Erfahrungen Schiessplatz Kasachstan , Autor ) Die Folgeautomatik ( tracking ) kann auf Festziele aufschalten
( bei langsam fliegenden Zielen in geringen Höhen im Clutter ) . Bodenclutter gelangt zusätzlich in dem Empfangstrakt. Die Russen haben am SA 3 System ein 2. Folgesystem ( " Wächterimpulse" ) , die das Entfernungsfenster / Winkelfenster beim Tracking " abschotten " und beim Durchflug gegen Bodenclutter
verhindern , dass auf Festziele aufgeschaltet wird .
Das Spiegelsignal verzerrt das eigentliche Zielzeichen . Die Winkelkoordinate wird verfälscht. Weitere Probleme mit Zielen in geringen Höhen beruhen auf der Bestimmung des Erst - und vor allem bestmöglichen Startpunktes der gelenkten Fla Rakete gegen das Ziel : Der Vernichtungszone ist ein Bereich der Feuereröffnung vorgelagert : Startzone . Nach Betrachtung der physischen Parameter : Geschwindigkeit , Höhe , Kurswinkel und Parameter,
wird unter Berücksichtigung von Leitmethoden und Flugzeit der Rakete das Feuer an einem Punkt im Raum so eröffnet , dass die Vernichtung des Zieles an der fernen Grenze der Vernichtungszone erfolgt ( optimal ) .
Unter
Chaff ( es wird unterschieden : vor dem Ziel , innerhalb der Wolke und hinter der Wolke ) verändert sich die Vernichtungszone ( und damit die Vernichtungswahrscheinlichkeit ) . Für Ziele in geringsten Höhen ( 10 -500 ) geht die VZ auf 1 / 3 zurück. ( SA 3 )
Bei Flug durch den Bodenclutter besteht Gefahr, das das Folgesystem sich auf Festzeichen aufschaltet . Über MTI wird gewährleistet , dass nur bewegende Ziele verarbeitet werden. Aber Zielzeichen werden verzerrt und trotz MTI ungenauer getrackt. Die Vernichtungswahrscheinlichkeit wird geringer....
Allgemeine Beschreibung der Koordinatenbestimmung .
Ergänzung
Der Flugkörper ist eine
vom Boden aus ferngelenkte Rakete. Eine Bodenstation fasst das Ziel mit Radar
auf und lenkt die Rakete über Radar / Funkbefehle zum Luftziel .
Die Antenne ( scharf gebündelter Strahl ) beleuchtet das Ziel und
empfängt die Reflektierten Signale vom Ziel und vom Flugkörper. Dieser
strahlt selber Energie ab und wird so vom Radar gesehen . Die Zielzeichen Ziel
und Rakete sind ähnlich. Es werden
Ziel und Raketen auf Sichtgeräten ( Seite , Höhe , Entfernung ) dargestellt.
Die Lenkkommandos werden
ständig kalkuliert. Es wird vor dem Start nicht der
voraussichtliche Treffpunkt im Raum berechnet und
der Flugkörper dorthin geschossen. Alleine schon deswegen , da das
Flugverhalten des Luftzieles nicht vorhersehbar ist. Der Flugkörper fliegt also
nicht vorausberechnet an einen Punkt im Raum , sondern wird ständig gelenkt auf
der Grundlage der sich ständig verändernden Zielkoordinaten.
Bei der
Flak allerdings
wurde der voraussichtliche Treffpunkt bestimmt und die Flak-Granate auf den
errechneten Treffpunkt geschossen. ( 8.000 Granaten auf einen Abschuss. )
Es kann bei
Feuereröffnung ein Vorhalt geschossen werden , dh. der Flugkörper kürzt etwas
Flugstrecke ab. Dieser Vorhalt ist nicht statisch und ist entfernungsabhängig.
Die Koordinatenbestimmung vom
Luftziel erfolgt manuell : 3 Operateure decken das Zielzeichen mit einer Marke
ab. ( HAWK , Roland , OSA ) Halbautomatisch : die Operateure beobachten die automatische Zielbegleitung
und greifen bei Abriss der Zielbegleitung
ein .( BUK, OSA, Roland ). Vollautomatisch . (
PATRIOT )
Die
Bestimmung der Koordinaten für die fliegenden Flugkörper erfolgt automatisch.
Um das Ziel nicht lange suchen
zu müssen werden zusätzliche Radarsysteme zur Zielsuche und Darstellung der Luftlage
genutzt.
Die Flugkörper senden
im Flug Signale ab und werden als Raketen- Zielzeichen auf den
Sichtgeräten dargestellt. ( GHz Bereich )
Diese Koordinaten ( Entfernung
, Seite , Höhe ) werden für jeden einzelnen Raketenkanal in der Rechenanlage
bewertet. Es werden nicht die absoluten Koordinaten ( Meter, Winkel in ° etc. )
bestimmt. Auf die Mitte des Zielzeichens wird entweder durch den Operator oder
bei den Raketensignalen ein Messimpuls gestellt. Bei Bewegung der Zielzeichen
stellt die Automatik diese Messimpulse wieder auf die Mitte des Zielzeichens .
Die
Raketenkoordinate "Seite " Kanal1 ( Rakete 1 ) wird mit der
Raketenkoordinate Ziel "Seite ) verglichen. Weichen die beiden Messimpulse
voneinander ab, wird diese Abweichung für die Rechenanlage als Befehl für ein
Lenkkommando verstanden :
"Stelle beide Messimpulse
übereinander ! "
Alle Lenkkommandos werden
ständig ( codiert )und gleichzeitig an die fliegenden Raketen gesendet. ( MHz Bereich ).
Die Entfernung
wird dabei ( eigentlich ) nicht benötigt, aber :
in Abhängigkeit der Entfernung
Rakete _ Ziel werden Lenkkommandos " feinfühliger " Bestimmte Lenkverfahren
benötigen die laufende Entfernung zur Berechnung der Lenkkommandos (
MHB Lenkverfahren ).
Mit Betrachtung der Entfernung lassen sich
Lastvielfache an der Fla Rakete und
Manöver des Zieleskompensieren . Der Funkzünder der Fla Rakete wird bei
bestimmter Entfernung der Fla Rakete scharf gestellt.
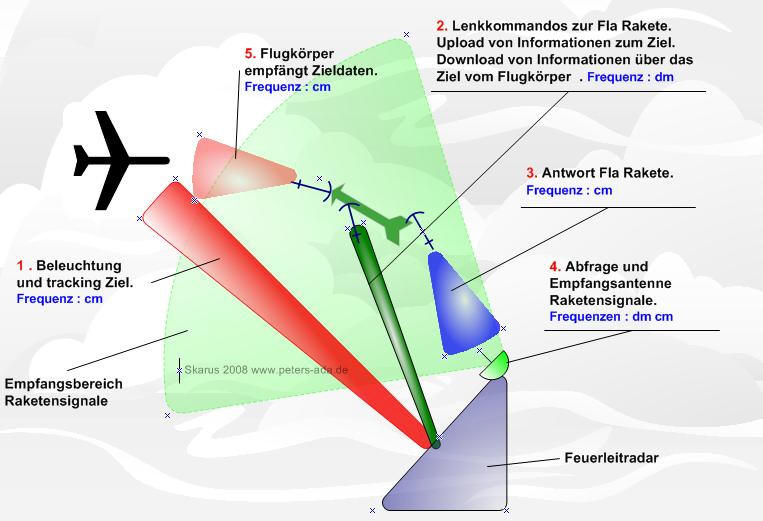
1.
Beleuchtung und Tracking.
Senderfrequenz ist elektronisch umstimmbar, entweder durch Frequenzverschiebung
bis außerhalb der Störung oder durch ständige Frequenzsprünge. Diese
Verschiebungen / Sprünge sollten nach dem Start von Fla Raketen und Lenkung der
Raketen zum Ziel für den Zielkanal unterlassen werden.
2.
Das Feuerleitradar strahlt zum Flugkörper Lenkkommandos ab. Diese Lenkfrequenzen
sind für alle gestarteten und fliegenden Flugkörper unterschiedlich. Die
Lenkfrequenzen werden von Flugkörpern immer wieder verwendet und sind gleich.
Jeder Flugkörper ist dem Feuerleitradar / Computer über eine Kennung bekannt und
wird auf seiner eigenen Frequenz angesprochen. Änderung dieser Frequenzen ist
technisch nicht möglich oder vorgesehen. Zusätzlich können Informationen vom
Flugkörper via download durch den Flugkörper hindurch nach unten zum
Feuerleitradar / Waffenleitrechner abgestrahlt werden. Die Frequenzen dieser
Informationskanäle sind festgelegt .
3.
Der Flugkörper antwortet aktiv. Die Sendefrequenzen sind festgelegt und während
des Fluges nicht veränderbar. Diese Abstrahlung wird vom Feuerleitradar
ausgewertet und bildet die Grundlage für
Koordinatenbestimmung und Bildung von
Lenkkommandos .
4.
Feuerleitradar fragt Flugkörper ab, dieser antwortet aktiv. ( siehe Punkt 3. ).
Dieser Kanal ( Raketenkanal ) ist äußerst wirkungsvoll störbar .Raketensignale
werden verzerrt und unterdrückt empfangen. Querverweis : Wie wird die
Koordinatenbestimmung unter Chaff ( Düppel ) und Jamming
beeinflusst ?
Prinzip der Peilung.
Der Dipol zum Abstrahlen rotiert etwas
außerhalb des Mittelpunktes der Antenne ("eiern")
Durch mechanisches Nachdrehen der gesamten Antenne erhält man bei genauer
Abdeckung 2
gleichgroße Hüllkurfen (Zielsignale).
Das Prinzip ist auch unter "Flimmerpeilung
bekannt."
Quellen Autor :
Peter Skarus, Dipl. ing. ( FH ) www.peters-ada.de
Der Autor studierte ( militärisch ) an einer
Bildungseinrichtung der deutschen NVA , am Lehrstuhl Fla Raketentruppen.
8 Jahre Dienst ( technisch -taktisch als LO bei 125
NEVA , 41. FRB 4133 ) bei den Fla Raketentruppen .
Das Thema Koordinatensystem war ein Teil von Vorlesungen im
Fach SFR Schiessen mit Fla Raketen und Teil des technischen Studiums der
Fla Raketentechnik. Das Thema ist
offen ( ohne militärische Geheimnisse ) und in offenen Lehrbüchern gut
beschrieben. Selbige
Begrifflichkeiten werden heute ( 2009 ) in englischer Sprache benannt ,
Prinzipien und Schaltungen sind ( fast ) die gleichen. Alles geht auf unsere
deutschen Erfinder der Fla Raketentechnik bis zum Jahre 1945 zurück.
Im Truppendienst waren die vom Hersteller
durchzuführenden technischen Überprüfungen und Abstimmarbeiten nur mit diesem
technischen Hintergrundwissen überhaupt auszuführen und zu verstehen .
Das " Erfassen " des Flugkörpers nach dem Start war am
Leitsichtgerät zu beurteilen und musste abgemeldet werden.
Faszinierend waren der Blick in das Koordinatensystem mit
Osziloskop während tracking von Zielen in geringen Höhen ( Erdoberfläche) oder
während jamming ( in Russland ). Die
Anleitung der Techniker am System ( Unteroffiziere mit 3 Jahren Dienstzeit
) und Einschätzung der Einsatzbereitschaft der RLS ( Raketenleitstation ) bei
der Funktionskontrolle forderten tiefes Verständnis der technischen
Zusammenhänge am System . Es war
täglich Brot eines Ingenieurs bei den Fla Raketentruppen.
Physik
von Jay Orear
Anteil für theoretische Wellen und HF Ausbreitung.
Ludloff,
Praxiswissen Radar und Radarsignalverarbeitung
Skolnik
Introduction to radar systems
Skolnik
Radar Handbook
New York 1970
 1942. Freya Radar.
1942. Freya Radar.
Introduction to Airborne Radar...
Intrduction to airborne radar
Stimson englisch
Abstimmvorschrift SNR S125 Koordinatensystem
Schiessregeln SNR 125
Erläuterung der Schiessregeln SNR 125
Militärverlag NVA
|
Die Bibel
|
Neupokojew und Geräte zur Lenkung von Fla
Raketen.
|
 |